亚特兰大植物园(Atlanta Botanical Garden)是许多植物的故乡,最近,它也成为了受树懒启发的3D打印机器人。您没看错。 SlothBot是一款3D打印机器人,设计为看起来像树懒,它在植物园中爬行,监视环境因素,例如天气,温度和二氧化碳水平。
The Atlanta Botanical Garden is home to many plant species and, as of recently, a sloth-inspired 3D printed robot. You read that right. SlothBot is a 3D printed robot, designed to look like a sloth, that crawls around the botanical garden monitoring environmental factors, such as weather, temperature and carbon dioxide levels.
这个可爱的机器人是由佐治亚理工学院的团队开发的,是与全球AM服务网络3D集线器合作制造的。 SlothBot安装在花园的Storza Woods区中,并提供一种节能的解决方案,用于实时监控环境状况。该机器人由太阳能电池板供电,并被编程为在温室中的长电缆上缓慢移动,模仿真实的树懒的慢节奏运动。
The adorable robot was developed by a team from the Georgia Institute of Technology and was manufactured in collaboration with global AM service network 3D Hubs. SlothBot is installed in the garden’s Storza Woods section and offers an energy efficient solution for monitoring environmental conditions in real time. The robot is powered by solar panels and is programmed to move slowly across a long cable in the greenhouse, mimicking the slow-paced movements of real sloths.
与无人机不同,SlothBot具有超长的电池寿命,因为它被设计为在静止时自动关闭。如果电池电量不足,机器人将移至较亮的区域,以便可以充电。
Unlike drones, the SlothBot has an exceptionally long battery life because it is designed to automatically switch off when it’s stationary. If the battery is running low, the robot will move into a brighter area so that it can recharge.
在设计和制造SlothBot时,佐治亚理工学院的团队最初是3D打印内部原型,该原型由一个5厘米的机器人组成,该机器人使用轮子沿电线移动。乔治亚理工学院的博士生Gennaro Notomista解释说:“第一个微型机器人原型是机器人算法的实现,在那里我们基本上有了一个带有太阳能电池板和一个很小的锂电池的微控制器。” “我们正在尝试使用我们开发的控制器来查看机器人是否能够移动以进行充电。”
In designing and building the SlothBot, the team from Georgia Tech initially 3D printed a prototype in-house, which consisted of a 5 cm robot that moved along a wire using a wheel. “The first tiny robot prototype was the implementation of the robotic algorithms, where we basically had a microcontroller with a solar panel and a very small lithium battery,” explained Gennaro Notomista, a PhD student at Georgia Tech. “We were trying to see, with the controllers we developed, if the robot was able to move in order to recharge.”
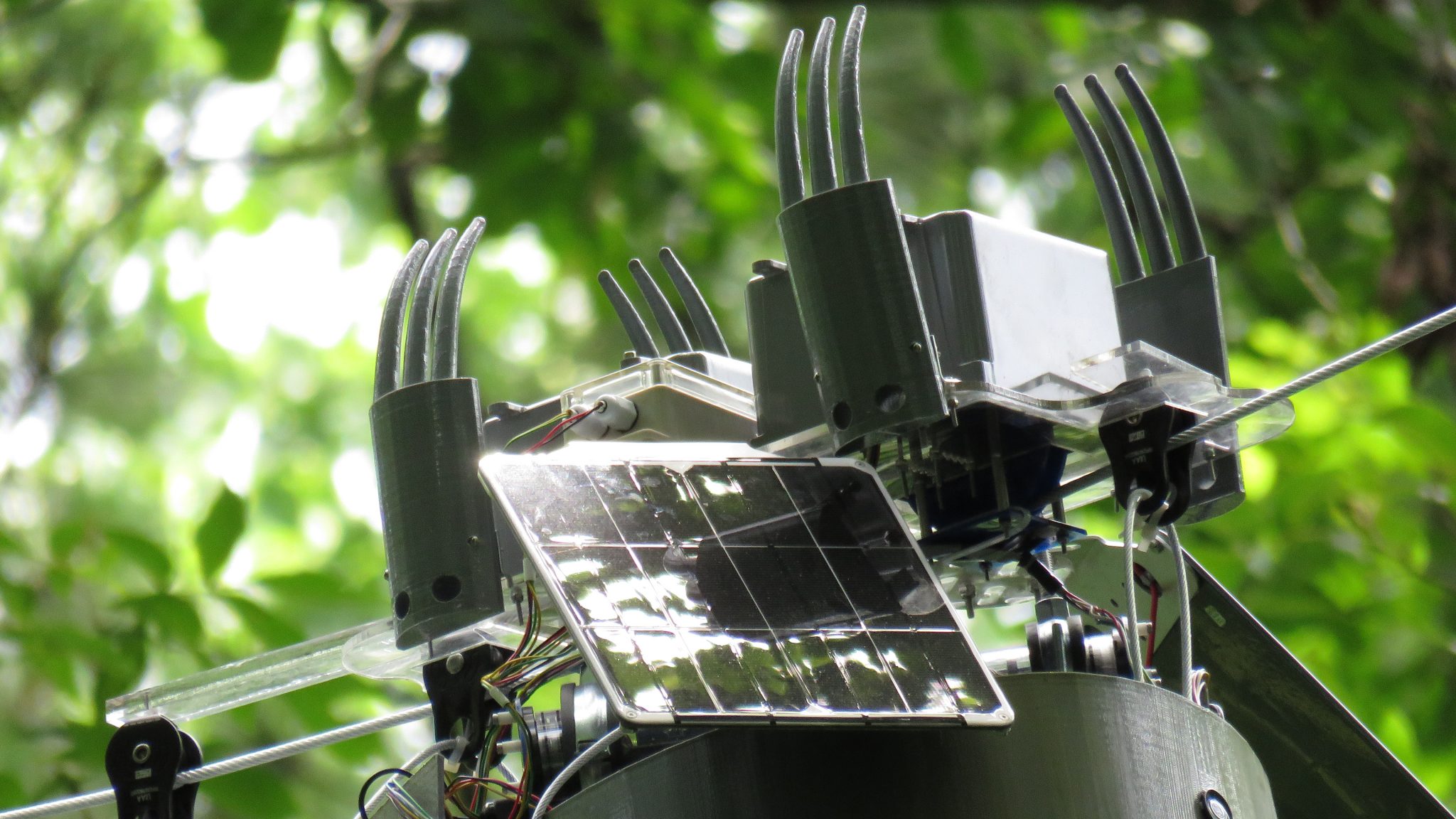
从那里,他们构思了第二个原型,其中集成了用于在电缆之间切换的故障安全机制。另外两轮原型制作使团队能够为漫游机器人找到正确的结构和权重。当机器人技术完成后,Notomista能够设计出树懒风格的外壳。这不仅仅是捕捉懒惰的懒惰的微笑:还必须考虑几个因素,例如材料类型(必须防雨和防紫外线)。
From there, they conceived a second prototype, which integrated a fail-safe mechanism for switching between cables. Another two prototyping rounds enabled the team to find the right structure and weighting for the roaming robot. When the robotics were finalized, Notomista was able to design the sloth-inspired shell. This involved more than just capturing the sloth’s lazy smile: several factors had to be taken into account, such as material type (it had to be rain and UV resistant).
“由于SlothBot可以部署在室外,我们希望外壳的材料至少要防雨和防紫外线,” Notomista说。最终,研究人员决定使用PLA Pro,这是一种具有必要强度的FDM材料,可以通过防雨和防紫外线涂层来完成。他补充说:“我们还考虑使用碳纤维,因为它本来会更坚固,但除了价格昂贵得多之外,我们还希望我们能着色的材料是碳纤维无法做到的。” “另外,引入过多的刚性并不总是一件好事,因为这意味着,当机器人撞击东西时,应力更容易传递到壳体内部的组件上。我们更希望外壳能够破坏内部组件。”
“Because the SlothBot would be deployed outdoors, we wanted a material for the shell that was at least rain and UV resistant,” said Notomista. Eventually, the researcher decided on using PLA Pro, an FDM material with the necessary strength and which could be finished with a rain and UV resistant coating. “We were also considering using carbon fiber as it would have been stronger, but besides being much more expensive, we wanted a material we could color, which wasn’t possible with carbon fiber,” he added. “Also introducing too much rigidity isn’t always a good thing because it means, when the robot hits something, stress is more easily transferred to the components inside the shell. We’d prefer the shell to break over damaging the components inside.”

SlothBot Georgia 3D集线器
外壳是通过3D Hubs的平台上传的,该平台提供了自动化(最终是一些手动)的设计反馈。该制造网络生产了SlothBot外壳的所有组件,这些外壳设计用于容纳电子组件(装在防水管中)以及电动机和传感器。
The shell was uploaded through 3D Hubs’ platform, which provided automated (and eventually some manual) design feedback. The manufacturing network produced all the components for the SlothBot shell designed to house electronic components (encased in a waterproof tube), as well as motors and sensors.
将来,Notomista希望这种缓慢移动的环保机器人在农业领域具有更多应用,包括监测授粉。对于此应用程序,机器人必须安装低功率卫星连接,以便可以部署在偏远地区。安装的相机和机器学习还将使SlothBot能够识别传粉媒介何时落在花上。目前,3D打印的SlothBot是对亚特兰大植物园的一种可爱而有用的补充。
In the future, Notomista hopes the slow-moving, eco-friendly robot will have more applications in the agriculture sector, including for monitoring pollination. For this application, the robot would have to be fitted with a low power satellite connection so it could be deployed in remote areas. A mounted camera and machine learning would also enable the SlothBot to recognize when a pollinator lands on a flower. For now though, the 3D printed SlothBot is a cute and useful addition to the Atlanta Botanical Gardens.
文章来源:3dprintingmedia

2024亚洲设计周「3DPP打印节」北京专场,一场震撼心灵的科技盛宴等你来!
2024-07-26