近日,新加坡国立大学的Ghim Wei Ho教授课题组在综合性期刊ACS NANO发表了一篇题为《Direct-Ink-Write 3D Printing of Hydrogels into Biomimetic Soft Robots》的论文,开发了一种基于水凝胶3D打印的仿生软体机器人设计方法。
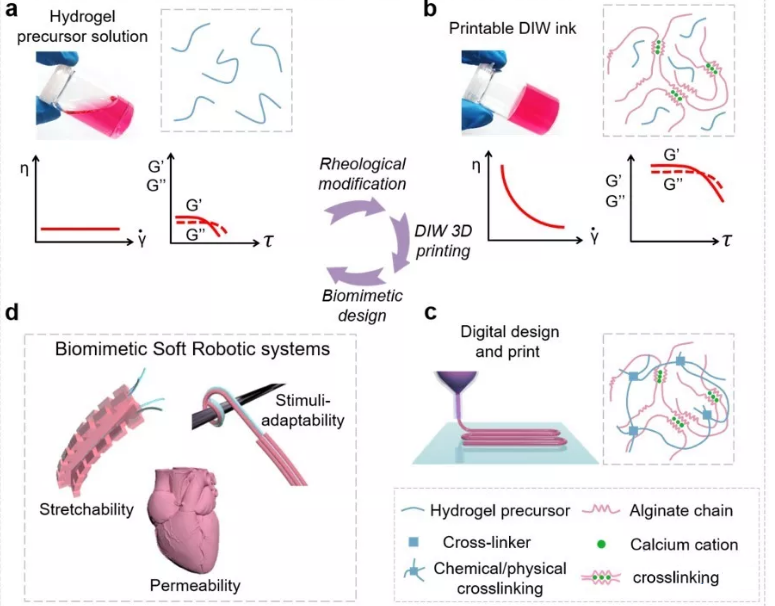
据悉,课题组通过利用具有良好生物兼容性的海藻酸钠作为高效流变性能调节剂,实现了一系列的化学交联以及物理交联水凝胶材料直接3D打印设计成型。海藻酸钠的本征亲水网络使得主体水凝胶能够保留本身的优异性能,同时双网络结构还显著增强了打印成型后软体机器人的力学韧性。利用这种方法,实现了基于不同特性水凝胶材料的仿生软体机器人设计。
为了对所开发的设计策略进行概念验证与展示,该课题组设计了基于不同水凝胶材料的三种仿生软体机器人,包括基于聚丙烯酰胺(PAM)的三维可转动触须、基于聚乙烯醇(PVA)的可跳动及物质传输仿生心脏、以及基于聚异丙基丙烯酰胺(PNIPAM)的向光性仿生植物藤蔓。
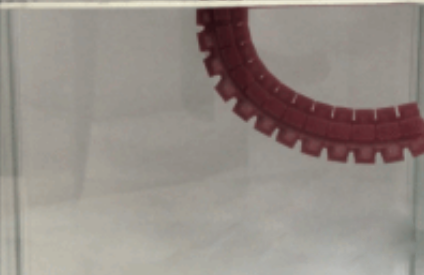
基于PAM的液压控制三维可转动触须
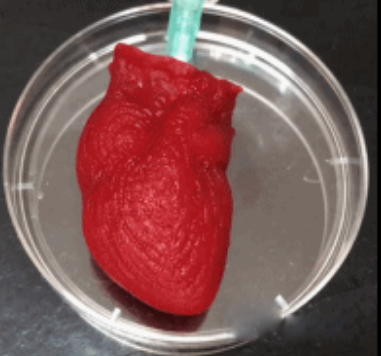
基于PVA的气动式仿生心脏跳动
基于PNIPAM的仿生藤蔓的向光性回旋运动

2024亚洲设计周「3DPP打印节」北京专场,一场震撼心灵的科技盛宴等你来!
2024-07-26