

巴特雷建筑学院(bartlett school of architecture)的设计计算实验室对机器人组装家具进行了新一代的调查,其本质就像乐高一样的积木,能够组装成复杂的结构。此次研究名为“mickeymatter”,与学校的“rchitectural design mArch”项目合作完成,一同聚焦于这种高效的生产方式。

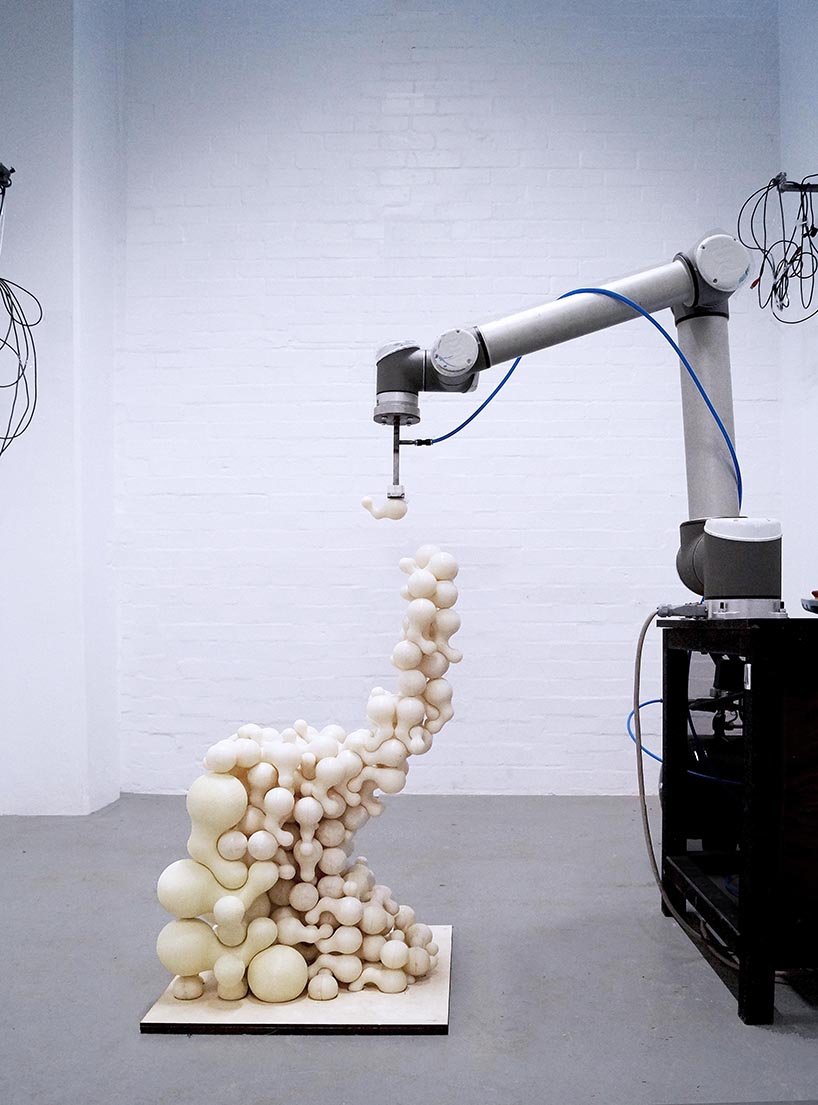
机器人用真空钳子捡起这些轻质元素,球形形状在装配过程中增加了耐用性
与乐高非常相似,这些标准化的积木是完全相同的。没有利用机器人用成百上千不同的元素实现一个复杂形式,这里的复杂性来自于简单积木的整合。这些积木可以理解为“立体像素”或“体积像素”——这种数字化方式在用于科学分析的计算机可视化非常受欢迎。独立的机器人组装要比 3D 打印以及其它形式的机器人组装速度快很多。它节约了成本,不同的材料能够同时保持高水平的形式复杂度。这些特质为机器人制造延伸至建筑规模打开了可能性。
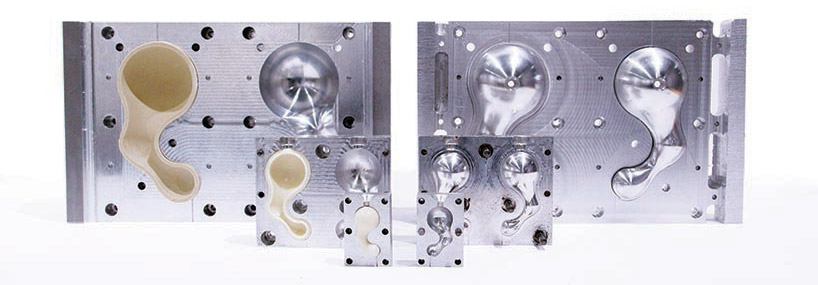
来自于 b -pro 研究小组的学生团队(panagiota spyropoulou, hyein lee, pooja gosavi, pratiksha renake)是“mickeymatter”项目的发起人,利用一种压缩浇铸处理,将注意力放在高效生产方式的研究上。他们还定义了三种不同规格的铝制名,经过计算机数控磨洗。可以用来生产廉价而高精密度的产品。这里使用的是 ABS 塑料小球,不过其它的材料如石膏混合物、软塑料等也经过测试。所有元素分为两部分,经过粘合后合二为一,实现了中空质轻的特点。

机器人组装桌子利用了两种尺寸的元素:较大的元素是一种石灰混合物,较小的元素由注塑模具制作而成
私人订制的真空夹子连接着工业机器人手臂,由机器人捡起积木并组装,采用的是一个简单而快速的分拣与放置机制。球面几何体减少了组装过程中对于高耐力与精密度的要求。圆形表面助力这些组件滑动到指定位置,加快了速度。所有组件均由真空吸力钳捡起后实现组装。

桌子的顶部展现了不同大小组件复杂的排列方式
该团队基于组合学开发了一种计算方式,能够高效地将这些积木组装在一起形成一种复杂且实用的结构。该算法测试了不同的原件组合,同时定义了连接点,能够帮助探索不同的设计可能。通过多样的旋转方式将积木元素组装在一起,从而产生不同图案类型,再根据连接力度以及机器人制造的局限性进行评估。
最后,这些数据会发送到机器人处用于组装。在原型组装过程中打造了两把椅子以及一张桌子。这些小规模的原型能够为更大规模的建筑组装研发精密的规则。首次制造的椅子与桌子采用了对称方式以及组合图案。第二把椅子通过较少的限制对组装进行了探索,最终呈现出非对称式的外形。
这款原型对建筑元素的组织与对称排列进行了更加深入的探索
就建筑尺寸而言,该系统可以在工厂环境内制作机器人组装大型建筑元素,然后再运输至现场进行组装。这些建筑元素可以采用各种材料,如混凝土、木材以及塑料等等。



利用巴特雷 b-pro 的制造设备,学生们研究开发出了他们自己的铝制模型,有着不同的规格尺寸。
项目信息
UCL 导师:gilles retsin, manuel jiménez garcía with vicente soler
学生:panagiota spyropoulou, hyein lee, pooja gosavi, pratiksha renake
技术助手:peter scully, b-pro











