由纽约大学丹顿工程学院与德国马克斯·普朗克智能系统研究所(MPI-IS)的合作研究小组以3D打印的形式命名为“ Solo 8”。我们设计了一个步行机器人,并将其信息公开。
ニューヨーク大学タンドン工学部(NYU Tandon School of Engineering)とドイツのマックスプランク知能システム研究所(The Max Planck Institute for Intelligent Systems/MPI-IS)の共同研究チームが「Solo 8」と名付けられた3Dプリント製4足歩行ロボットを設計し、オープンソースとしてその情報を公開した。
该机器人与Boston Dynamics的四足步行机器人“ SPOT”非常相似,是一款完全开源的四足步行机器人,任何人都可以轻松升级或修改以进行组装。
ボストン・ダイナミクスの4足歩行ロボット「SPOT」に酷似したこのロボットは、完全にオープンソース化された4足歩行ロボットで、誰でも簡単にアップグレードまたは修正して組み立てることができるシステムとなっている。
最初的SPOT(开发人员浏览器)价格约为800万日元,而Solo 8则采用高性能无刷直流电机,价格适中的小型传感器,低功耗微控制器和电池进行加工。由于它由除电动机轴和皮带轮以外的市售零件和3D打印机组成,因此预算有限的研究团队(如初创企业,小型研究机构和教育机构)可以轻松使用它。
本家の「SPOT(開発者向け EXPLORER)」が約800万円なのに対し「Solo 8」は、高性能なブラシレスDCモーターや手頃な価格の小型センサー、低消費電力マイクロコントローラー、バッテリーなど、機械加工されたモーターシャフトとプーリー以外は全て市販の部品と3Dプリンタで構成されているため、スタートアップや小規模な研究施設、教育機関など限られた予算で運営される研究チームでも気軽に利用することができる。

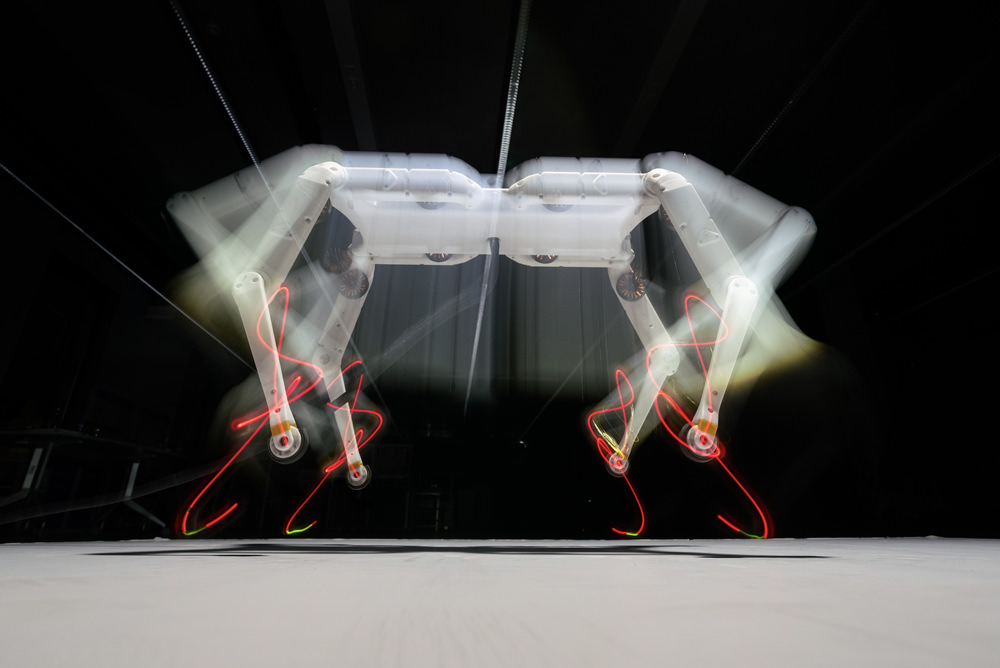
“ Solo 8”的尺寸由3D打印的车身和四条腿组成,重量轻,车身长度为42厘米x宽度为33厘米,重量为2.2千克,可以通过电线或WiFi进行控制。此外,所有布线都位于3D打印的外壳中,因此电缆不会裸露。此外,由于所需零件的数量很少,因此无需高级知识即可轻松组装模块。
3Dプリントされたボディと4本の足から構造される「Solo 8」の大きさは、胴体の長さ42cm×幅33cm、重さ2.2kgと軽量で、有線またはWiFiで制御することが可能。また、配線類は全て3Dプリントされたシェル内に収められるため、ケーブル類の露出などが無い構造になっている。さらに、必要な部品点数が非常に少ないため、高度な知識がなくても簡単にモジュールを組み立てることができる。

小型轻巧的“ Solo 8”可以由一个研究人员在狭小的空间(例如实验室)中进行控制。当直接在真实的硬件上测试学习算法时,此功能非常重要,并且可以构建快速,安全且具有成本效益的测试环境。
小さくて軽量化な「Solo 8」は、研究室などの狭いスペースでも研究者一人で制御することができる。この特徴は、学習アルゴリズムを実際のハードウェア上で直接テストする際に重要であり、迅速かつ安全にコストを抑えたテスト環境を構築する。
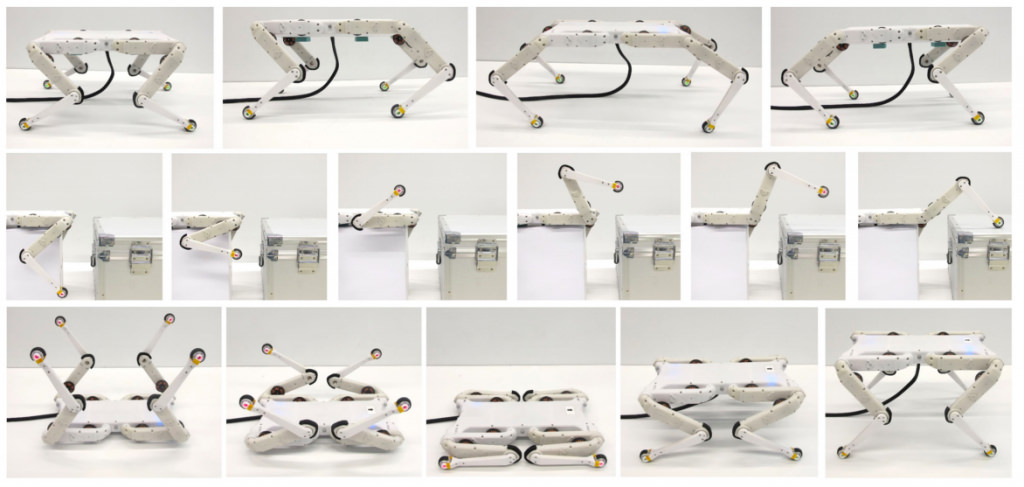
下一步,研究团队正在开发四足机器人“ Solo 12”的新版本。 “ Solo 12”具有12个执行器,每条腿3个。初步测试证实,它比以前的型号更具通用性,并且可以执行各种复杂的动作。
研究チームは次のステップとして、4足歩行ロボットの新しいバージョン「Solo 12」の開発を進めている。この「Solo 12」は、脚毎に3個づつ合計12個のアクチュエータを搭載。初期テストにおいては、前モデルよりも汎用性が高く、複雑な行動を幅広く実行できることが確認されている。
文章来源:idarts