普渡大学机械工程学院的研究人员为生物医学应用中的药物输送等应用开发了一种创新的新型构图方法。作者在最近发表的“具有用于识别和跟踪的集成结构颜色的3D打印微型机器人”中详细介绍了他们的研究,作者通过使用双光子聚合(TPP)的技术使我们洞悉了微米和纳米级的新模式,该技术可提供亚微米级解析度。
虽然微型机器人(分为生物、混合和合成组)在诸如微操纵和高级感测等应用中很有帮助,但由于需要在一个设备中组合致动和无线控制、微型结构的开发仍然存在障碍。在很多情况下,尺寸是一个问题,尽管通常在外部提供驱动。使用微型机器人系统、视觉和跟踪在体外和体内过程中也面临着广泛的挑战。
研究人员说:“对于尺寸较小的3D打印微型机器人,需要有替代的制造方法来整合独特的跟踪功能,包括使用荧光材料(例如量子点)或使用选择性附着在特定官能团上的荧光团标记微型机器人表面。”“尽管它们成功地进行了跟踪,但这些材料会随着时间的流逝而失去荧光,但限制了其使用寿命。”
在这项研究中,色彩扮演着重要角色,图案由指向上方的棱镜阵列组成,从而允许团队将其整合到微型机器人的不同区域。模式开发如下:
· 红色图案–尺寸为160 nm x 170 nm的块
· 绿色图案–占位面积为120 nm x 90 nm的块
· 螺旋和平台微型机器人上的阵列均由所有红色(R),所有绿色(G)或交替的红色和绿色(RG)组成
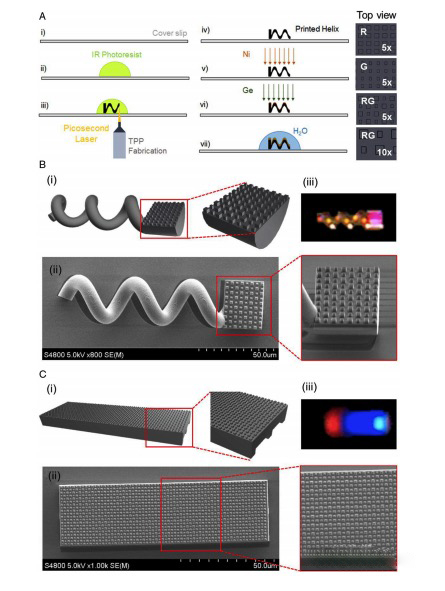
具有结构彩色特征的3D打印微型机器人的制造和表征。A)3D打印的微型机器人的制造过程:(i)-(iii)IP-DIP光致抗蚀剂沉积在载玻片上,并使用TPP制造系统(Nanoscribe Photonic Professional GT)打印微型机器人;(iv)去除未聚合的光致抗蚀剂;(v)-(vi)Ni和Ge依次沉积(分别为100和35 nm)到2Åsx1的结构上;(vii)将微型机器人移至水溶液中,然后使用微量移液器将其释放。B)(i)螺旋微型机器人的CAD设计,该螺旋微型机器人的结构彩色区域位于螺旋头的顶面上。根据Nagasaki等人[41]的尺寸,不同的晶胞设计包括G和RG。(ii)具有10 x RG图案的单个螺旋微型机器人的扫描电子显微镜(SEM)图像,以及(iii)在白光下显色的相同结构的光学图像。C)(i)具有结构颜色图案的控制平台微型机器人设计的CAD图像。(ii)具有5 x RG图案的控制平台的SEM图像,以及(iii)在表示颜色的白光下具有相同结构的光学图像。(注意:根据Basler的Pylon Viewer软件,光学图像采集期间的饱和度值为4)。
取决于光源,表示的颜色可能会有所不同。作者指出,为了增加色彩对比度,他们使用了高折射率的Ge介电层。但是,该研究样本的结果仅为“最小”。将光源设置在固定位置,然后用手旋转,每次颜色发生明显变化时都记录图像。

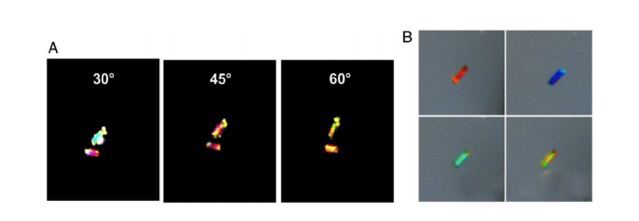
结构颜色表征。A)使用ImageJ获得的RGB值,从在CIE1931颜色空间中绘制的螺旋微型机器人表示的颜色。螺旋状微型机器人表示的颜色与角度的关系的光学图像:B)5 x R,C)5 x G,D)5 x RG和E)10 x RG。
研究人员说:“与仅R和G模式相比,RG模式显示出更广泛的色彩范围。”“ R和G模式仅表示蓝色和红色的明亮颜色,而RG另外表示明亮的绿色。”
“根据所应用的角度对颜色表达进行微调,可以通过识别微型机器人在3D工作区中移动时的颜色变化,从而实时提供微型机器人在xy和z方向上的位置的实时信息。”
相对于垂直倾斜的结构颜色。A)在平面化的硅片上释放的控制平台,其倾斜角度为水平面30、45和60。(注意:为清楚起见,已删除了图像背景。)B)控制平台,其中一个边缘固定到透明基板上,另一个边缘使用磁场以不同的量倾斜出平面,从而产生不同的颜色表示。对于零件(A)和(B),当平台倾斜时,将灯保持在同一位置。
螺旋微游泳器依赖于作动器的旋转磁场,而控制平台微型机器人则依靠依赖于MagnebotiX线圈系统的梯度场。研究人员指出,随着控制平台的旋转,可以看到颜色以及使用低频的螺旋机器人上也可以看到颜色。研究人员确实注意到,尽管颜色根据方向和光源而有所不同。
“使用结构色块尺寸的变化来探索操纵颜色表达的能力。在这项研究中,交替的块几何形状比具有单一块几何形状的阵列提供的颜色范围更大。”研究人员总结说。“随着微型3D打印技术精度的提高,以及通过探索复杂的图案,可以获得非虹彩颜色。”
“最近已针对类似于Morpho蝴蝶的3D打印薄片状结构证明了这一点,尽管这种类型的图案仅表现为人造蓝色,并且在移动时未应用于结构。通过探索新的经过计算设计的结构并将其集成到3D微机器人系统中,结构颜色不仅可以成为跟踪和识别的通用元素,而且可以创建可调整的表面特性。
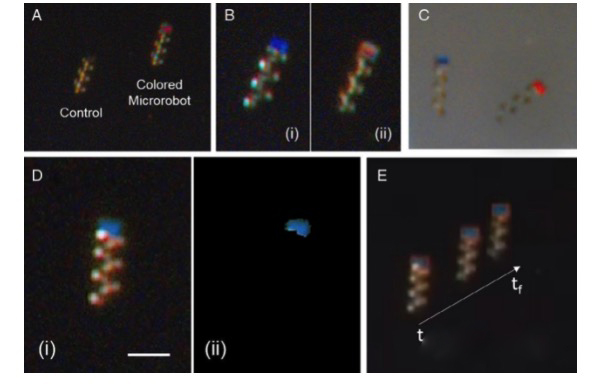
颜色跟踪和运动评估。A)螺旋微型机器人的头部具有完整的结构颜色,表示为红色,紧随其上没有纳米图案的对照微型机器人的光学图像;B)以(i)低频和(ii)高频表示的颜色;C)在透明基板上具有不同纳米图案的两个彩色螺旋微型机器人。D)应用于彩色螺旋微型机器人的基于颜色的跟踪算法,其中真实的光学图像(i)由该算法使用图像(ii)中所示的颜色跟踪蒙版进行识别。E)微型机器人跟踪的汇编,起始位置由ti指示,其结束位置为tf。比例尺,50μm。
在涉及创新的微结构,精子机器人和各种不同技术的研究项目中,微型机器人和药物输送系统继续受到3D打印的影响。