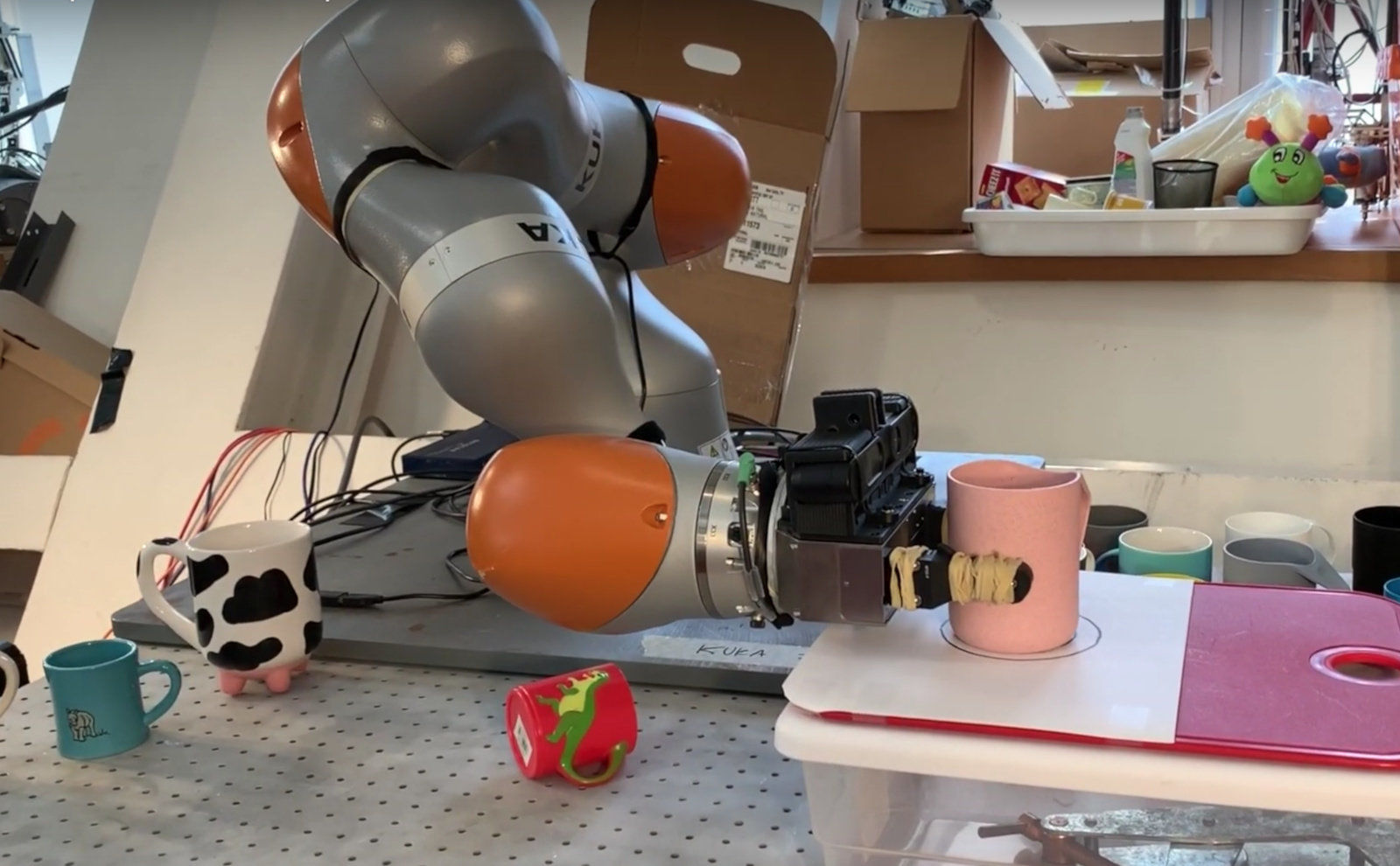
虽然随着科技的演进,机器人们也变得越来越聪明了,但多数于工厂作业的机器人,依然需要通过事先设定,才有办法正确处理眼前的事务。然而麻省理工学院计算机科学与人工智慧实验室(CSAIL)近来开发出一种新系统,将能赋予机器人们学会并处理首次见到的物体的能力。这个新系统名为 kPAM,它能让机器人将眼前的物体视为一系列 3D 节点的组合,并借此创造出对应的视觉蓝图,以判断该如何行动。
CSAIL 表示,kPAM(Keypoint Affordance Manipulation)运算的结果比其它现有的类似技术都更为准确。它在侦测对象并建立起所有 3D 节点座标后,就能决定该如何使用眼前的物体。例如,当搭载此技术的机器人看到一个带手柄的杯子,它就能判断可以将杯子挂在钩子上。如果它确定眼前是一双鞋子,它就会把鞋子放置到鞋架上。负责该计划的资深学者 MIT 教授 Russ Tedrake 说明,归功于当今最先进的机械学习感知技术与规划演算法,如今这般「多了解一下对象(确认 3D 节点座标位置)」的短暂过程,才能够顺利地让机器人达成各类实用的任务。
目前研究人员们希望对该系统作进一步的开发,直到由 kPAM 驱动的机器可以完成更大型的任务,例如自动由洗碗机中将碗盘取出,或是自行用抹布将厨房擦一遍等。同时,他们也希望该系统未来可以为工厂中操纵庞大机具的机器人提供支持。